Обикновено хората асоциират роботите с висок интелект и футуристични способности, които виждат във филмите. Марк Андерсън от Equinix обаче отбелязва, че реалността все още е доста по-различна. Той е старши директор за глобални решения в компанията, чието българско звено е най-големият доставчик на колокационни услуги в страната.
Роботите днес все още са много далеч от тези способности, които хората виждат във филмите и сериалите. За сега роботиката е специализирана в нишови решения. Има много ефективни роботи, но те са насочени в изпълнението само на няколко определени задачи. В повечето случаи това са семпли, повтаряеми дейности като заварки, пакетиране, броене на стока и др., отбелязва Андерсън.
Реалност спрямо очаквания

В момента роботите разчитат на предварително програмиране. Те могат да вършат програмираните дейности с голяма прецизност и ефективност, но ако то не покрива дадено предизвикателство, те няма да могат да се справят. Всякакви вариации също могат да направят проблем. Например, ако позицията на елемента е леко променена, роботът може да не успее да направи заварката както трябва.
Разбира се, вече има и системи, които могат да се адаптират към известни разлики. Компютърното зрение и разпознаване на обекти също се подобрява, но дори и това не е достатъчно за роботите да са истински автономни. Затова е необходим постоянен надзор от хора по поточните линии, за да е сигурно, че всичко е в нормите.
Има напредък
Но има и добри новини, казва Андерсън. IT индустрията постепенно започва да намира решение на проблемите и предизвикателствата. Едно от тях е компютърно зрение чрез сензори, което обаче използва специфичен софтуер и изкуствен интелект.
Това ще позволи на роботите не само да „виждат“, но и да се адаптират към заобикалящия ги свят дори и случващото се да не припокрива точно предварителното им програмиране. Но според Андерсън истинският напредък тепърва предстои и ще бъде движен от т.нар. двупосочно обучение.
„Истинският напредък при роботиката тепърва предстои и ще бъде движен от т.нар. двупосочно обучение“Марк Андерсън, Equinix
 „Истинският напредък при роботиката тепърва предстои и ще бъде движен от т.нар. двупосочно обучение“Марк Андерсън, Equinix
„Истинският напредък при роботиката тепърва предстои и ще бъде движен от т.нар. двупосочно обучение“Марк Андерсън, EquinixТова е доста по-сложна система, която обаче има и по-голям потенциал. Всеки робот ще може да използва наличните технологии и сензори, за да се адаптира към средата, но и ще може да споделя наученото с облачен сървър. Информацията там ще се обобщава и обновява според новите данни. Така централният алгоритъм също ще може да се усъвършенства постоянно.
Всичко научено ще може да се споделя и с други роботи. Така всеки робот не само ще дава знания на останалите, но и ще получава такива от тях.
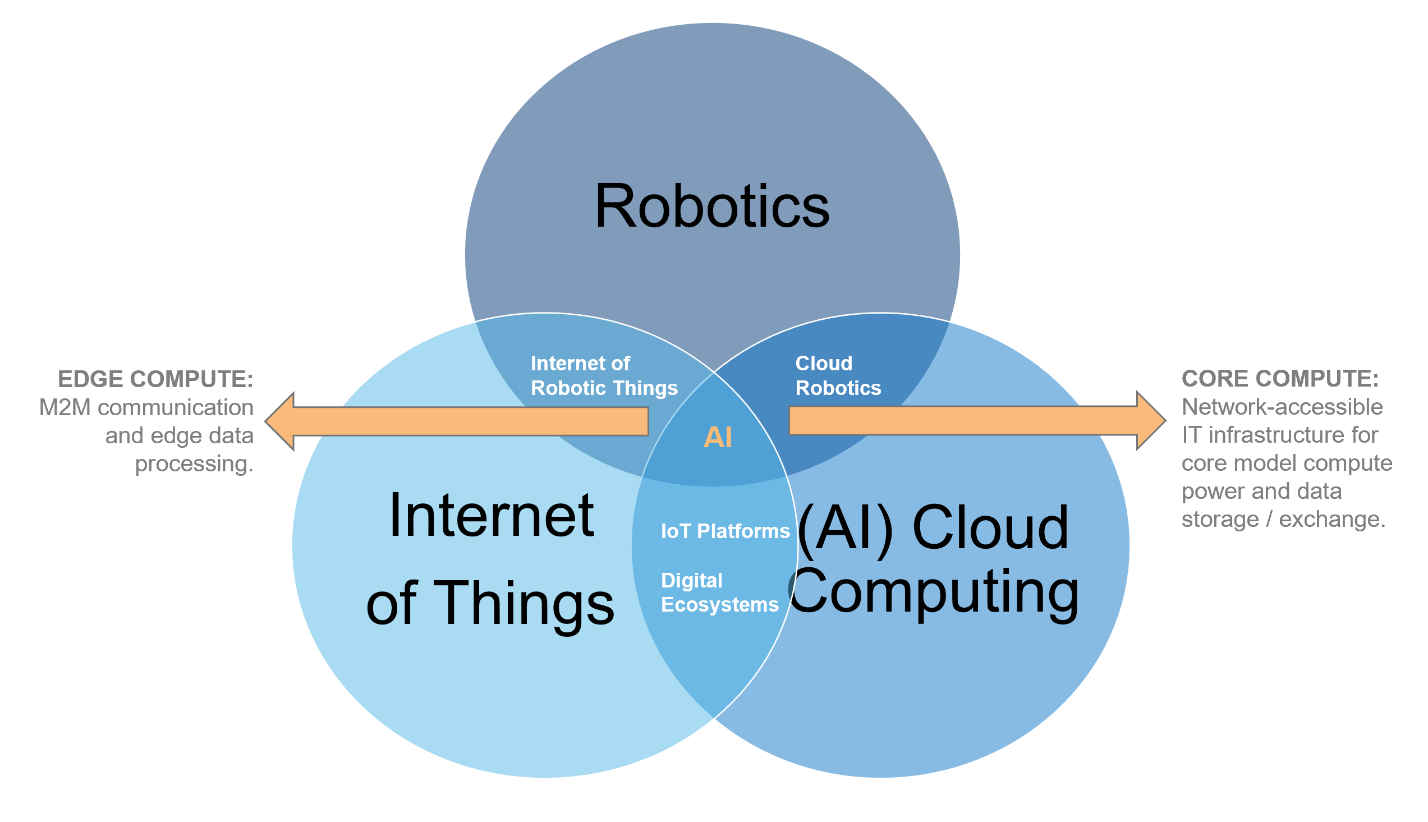
Роботите ще могат да са свързани в мрежа и с други сензори, устройства от Интернета на нещата и дори дигитални екосистеми за обработка на данните и изграждане на нови модели за изкуствен интелект (AI). Всичко това ще генерира огромен обем информация, която постоянно ще се променя. Тя ще трябва да се анализира, обработва и препредава в реално време. Затова ще се разчита много на дистрибутирани, хибридни, мултиклауд системи. Така ще се осигури ниска латентност и висока сигурност на данните.
Какви ще са резултатите от това?
ABI Research описва всичко това като Internet of Robotic Things (IoRT). Такива системи ще позволяват на роботите да разчитат на облака, за да обменят информация с много други източници. Така те ще могат в реално време да се адаптират към условията, както и да се подготвя за реакция за наближаваща промяна. Например робот-мияч на прозорци, който получава предупреждение за усилване на вятъра и съответно трябва да се прибере по-рано.
IoRT практически ще е превърне в петте сетива на роботите. Така те ще могат да събират достатъчно данни, без да се налага да биват затрупвани с най-различни сензори, които ще правят производството и поддръжката им по-сложна и скъпа задача. „Облачната роботика“ ще позволи подобряване на основните модели на изкуствения интелект и ще ги разпространява по-бързо, казва Андерсън.
Той дава за пример работата на група автономни камиони за доставка на стоки. Всеки от тях разполага със сензори, AI „ръководител“ и споделя данните си в облак с другите камиони. От тях става ясно, че дадено кръстовище създава проблеми на някои от камионите. Или пък има ремонт, за който не е съобщено предварително. Централният алгоритъм ще може да забележи този проблем, да изработи указания за справяне с предизвикателството, които да изпрати до всички камиони в реално време.
Основното предизвикателство е латентността
Противно на очакванията, качеството и скоростта на връзката ще е по-важна от много други фактори, за да се реализира двупосочното обучение. Осигуряването на достатъчно мощен хардуер и съхранение на данните е лесната част, но гарантирането на връзката ще изисква специфичен подход към инфраструктурата, казва Андерсън.
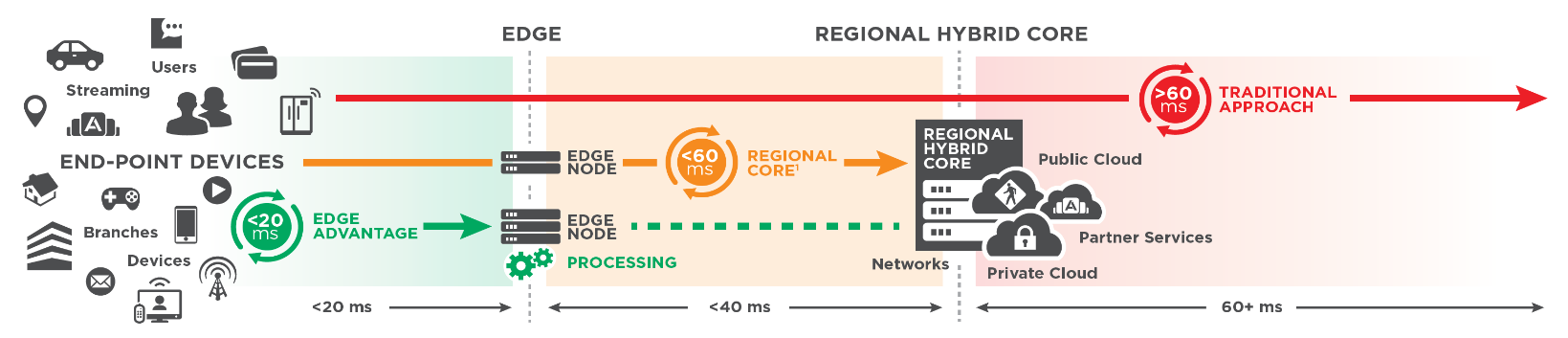
Той казва, че Machine-to-Machine (M2M) комуникациите изискват латентност под 20 ms. Особено, когато става дума за изпращане на нови инструкции, които са нужни в реално време. Андерсън казва, че е нужна дистрибутирана IT инфраструктура, която да скъси дистанцията между робота и точка на достъп до широколентова връзка. Най-добре е решенията да са неутрални от гледна точка на производители и доставчици, подобно на Platform Equinix. Тук влиза и развитието на 5G мрежите, които в комбинация с Edge и облачните технологии ще помогнат значително на AI решенията.
Така компаниите ще могат да използват разнообразен набор от облачни платформи, екосистеми, алгоритми и т.н., като ще се осигурява бърза и стабилна връзка във всеки момент. Всички тези аспекти трябва да се развиват паралелно, за да могат роботите да напредват с постоянно темпо. Така ще могат да се изградят не само добра инфраструктура, но и нови и подобрени AI модели, които да се използват от роботите.